
As the field of robotics rapidly advances, developing and managing complex robots becomes increasingly challenging. This is where ROS (Robot Operating System) and ROS2 come into play. In this article, we will explore what ROS and ROS2 are, the sectors they are used in, their advantages, and what they might offer in the future.
What are ROS and ROS2?
ROS and ROS2 are open-source software platforms used for controlling and managing robots. Rather than being an operating system, they provide an environment that facilitates communication between robot components, the execution of algorithms, and data processing. ROS2 is a newer and more advanced version of ROS, released by Open Robotics in 2015.
Areas of Use:
The development of ROS and ROS2 is considered a turning point in the field of robotics. These platforms offer flexibility and power applicable across various fields. For instance, they can be used in industrial robots for tasks ranging from complex assembly lines to logistics operations. They also have a significant impact in the field of service robots. Cleaning robots are widely used, especially in healthcare facilities, to enhance hygiene standards. Robots designed for patient care have become increasingly important with the aging population.
ROS and ROS2 are utilized for robotic applications across various sectors:
- Industrial Robots: Used for controlling robotic arms in assembly lines, production, and logistics.
- Service Robots: Used for controlling cleaning robots, patient care robots, unmanned aerial vehicles (UAVs), and underwater robots.
- Research and Development: Used for developing new robots and robotic algorithms.
- Education: Used for robotics and artificial intelligence training.
Differences Between ROS and ROS2:
ROS2 is the newer and more advanced version of ROS. The main differences are:
- Communication Infrastructure: ROS2 uses a more modern communication infrastructure called DDS (Data Distribution Service), providing faster and more reliable communication.
- Multi-Platform Support: ROS2 supports more platforms, including Windows, macOS, and Linux.
- Improved Performance: ROS2 is designed for better performance and scalability.
- Security: ROS2 offers more advanced security features.
- User-Friendliness: ROS2 has a more user-friendly interface compared to ROS.
For more information about ROS/ROS2, you can visit their respective websites.
Why is it Advantageous to Use ROS/ROS2?
Using ROS and ROS2 offers several advantages:
- Time Savings: Developers can save time by using the pre-built components and tools provided by ROS and ROS2, rather than reinventing the wheel.
- Ease of Use: ROS and ROS2 offer easy-to-use and straightforward platforms.
- Large Community: There is an active and supportive community behind ROS and ROS2.
- Open Source: ROS and ROS2 are open-source platforms, meaning they are free and accessible to everyone.
- Wide Range of Robotic Applications: ROS and ROS2 are suitable for different types of robots.
In the future, it is expected that ROS and ROS2 will become even more widespread and advanced. As their use increases, robots will become more complex and capable of interacting more effectively with humans. With the adoption of concepts like Industry 4.0 and smart cities, the importance of ROS and ROS2 will grow even further. These platforms will contribute to increased automation and efficiency by enabling robots to communicate more effectively with each other and their surroundings.
ROS/ROS2 Applications
ROS applications cover a wide range of areas. These applications are used to control complex robot systems, perceive their environment, and interact with it. Here are some key application areas of ROS:
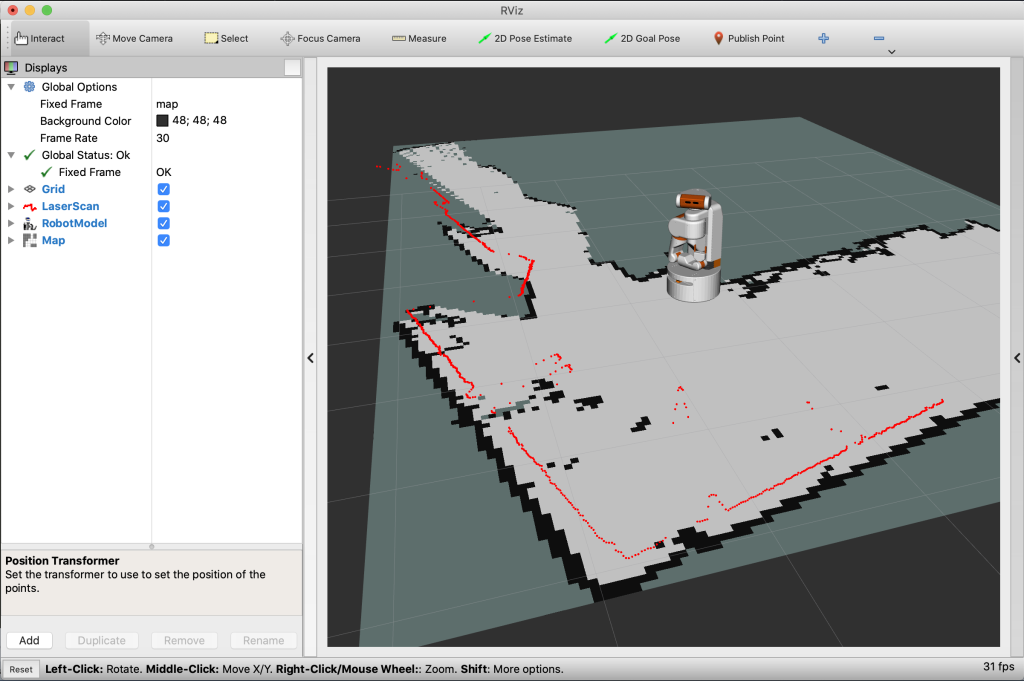
- Simultaneous Localization and Mapping (SLAM): SLAM is a technique used for a robot to position itself in an unknown environment while simultaneously mapping its surroundings. ROS provides numerous libraries and tools for implementing SLAM algorithms, allowing robots to accurately determine their position while exploring their environment.
You may visit slam_toolbox github for more information.
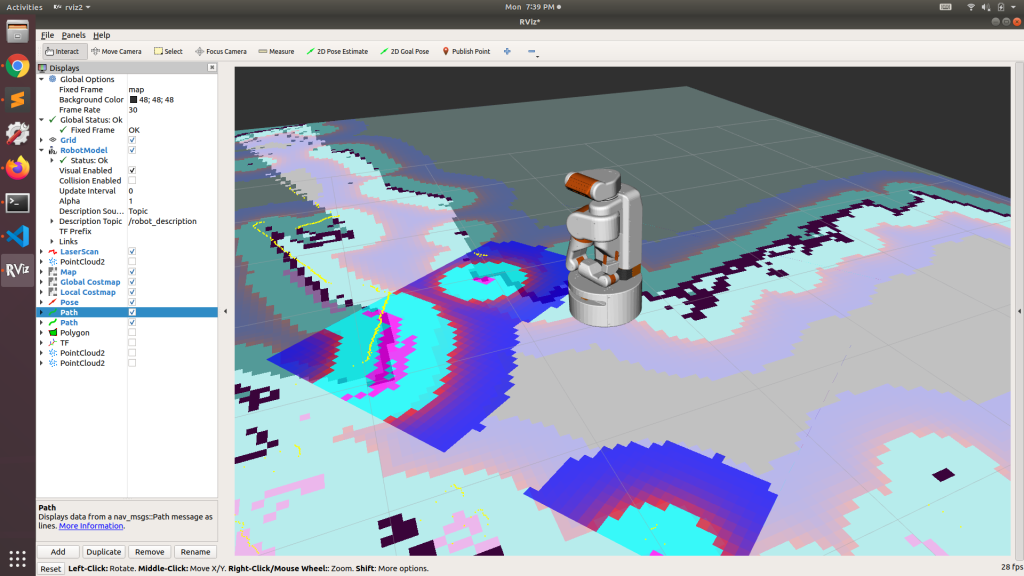
2. Navigation 2 (NAV2): NAV2 is an advanced version of ROS’s Navigation Stack. This system allows robots to travel safely and efficiently to specific targets. NAV2 supports features such as mapping, obstacle detection, and path planning, enabling robots to navigate complex environments. You can visit the link for the NAV2 package in ROS2 for more details.
For more information about ROS2 NAV2 package, you may visit this link.
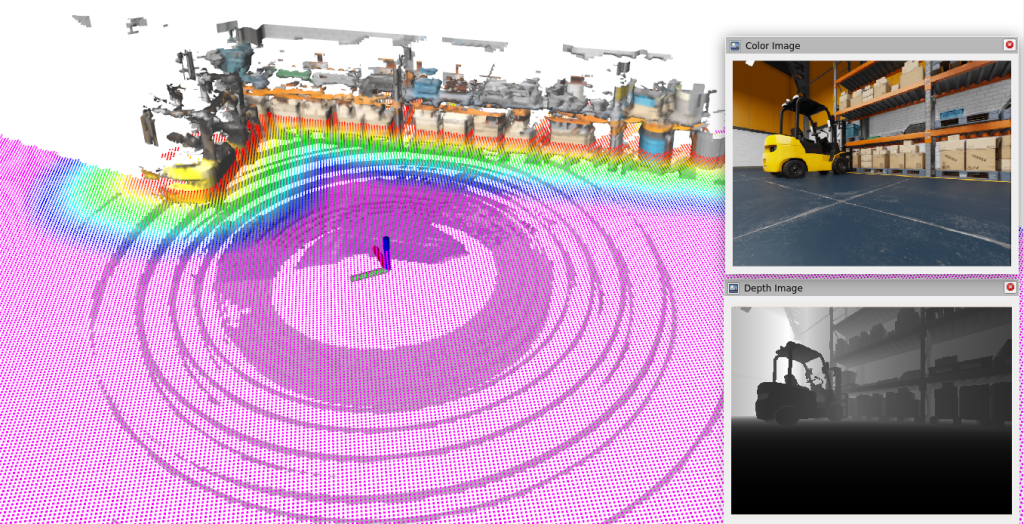
3. nvblox: nvblox is a ROS package that enables a robot to perceive its environment in 3D. This package uses lidar and other sensor data to determine the locations of objects in the environment and processes this information into a map. As a result, robots can understand their surroundings in more detail and interact effectively. You can find more information about nvblox here.
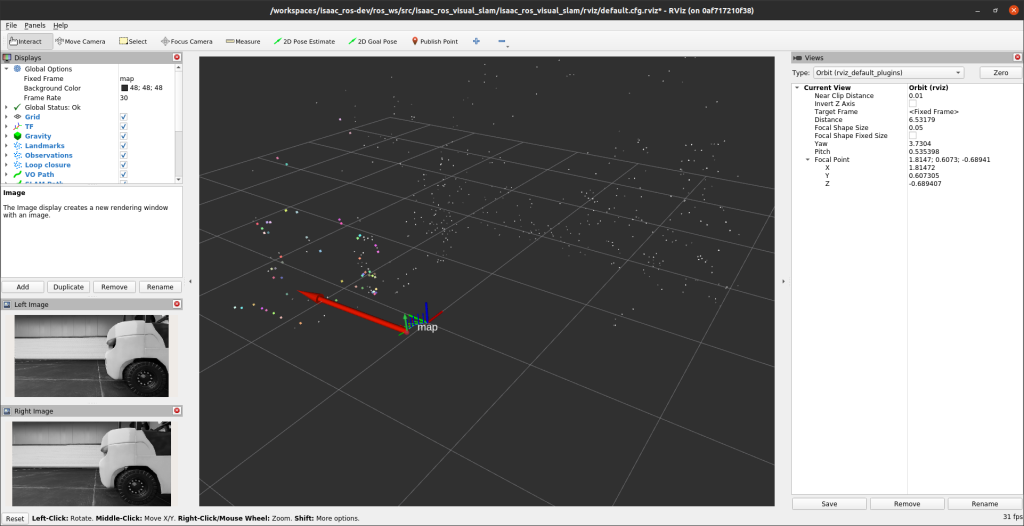
4. Visual SLAM (VSLAM): VSLAM is a technique that uses image sensors such as cameras to map a robot’s surroundings and determine its position. ROS provides tools for implementing various VSLAM algorithms, allowing for image-based navigation and environment modeling. For detailed information about VSLAM, you can visit this link.
5. Object Detection and Segmentation: Object detection and segmentation are crucial capabilities that enable a robot to identify and distinguish objects in its environment. ROS offers libraries and tools for implementing various object detection and segmentation algorithms. This allows robots to identify objects in their surroundings and interact based on this information.

These ROS applications enhance the intelligence, flexibility, and effectiveness of robotic systems. They enable robots to better understand their environments, interact with them, and perform various tasks.
Contact us to learn how to use algorithms in your systems with ROS/ROS2
Join the AI revolution with Soluino. Experience the future today!
Leave a Reply