The Rise of Humanoid Robots
Humanoid robots are quickly becoming a reality, with machines built on platforms like NVIDIA Isaac GR00T already demonstrating abilities to walk, manipulate objects, and interact with their surroundings.
Training Challenges and the Role of Synthetic Data
Training these sophisticated machines requires vast and diverse datasets, which can be both time-consuming and expensive to collect in the real world. Synthetic data generation (SDG) offers a powerful solution by creating physically accurate digital twins and virtual environments.
OpenUSD and NVIDIA Omniverse
Universal Scene Description, or OpenUSD, is a robust framework that simplifies the creation of these physically accurate virtual environments. Once these 3D environments are built, OpenUSD enables the development of detailed, scalable simulations where robots can hone their skills through lifelike scenarios.
This synthetic data is crucial for teaching humanoids complex behaviors like walking, grasping, and navigation. OpenUSD is instrumental in accelerating the development of these robots, paving the way for their integration into daily life.
The NVIDIA Omniverse platform, powered by OpenUSD, allows developers to unify 3D assets from various sources like 3DCAD and DCC tools. This capability facilitates the construction of large-scale virtual environments and the execution of complex simulations necessary for robot training, leading to more efficient and cost-effective development and collaboration.
Advancing Robot Training With Synthetic Motion Data
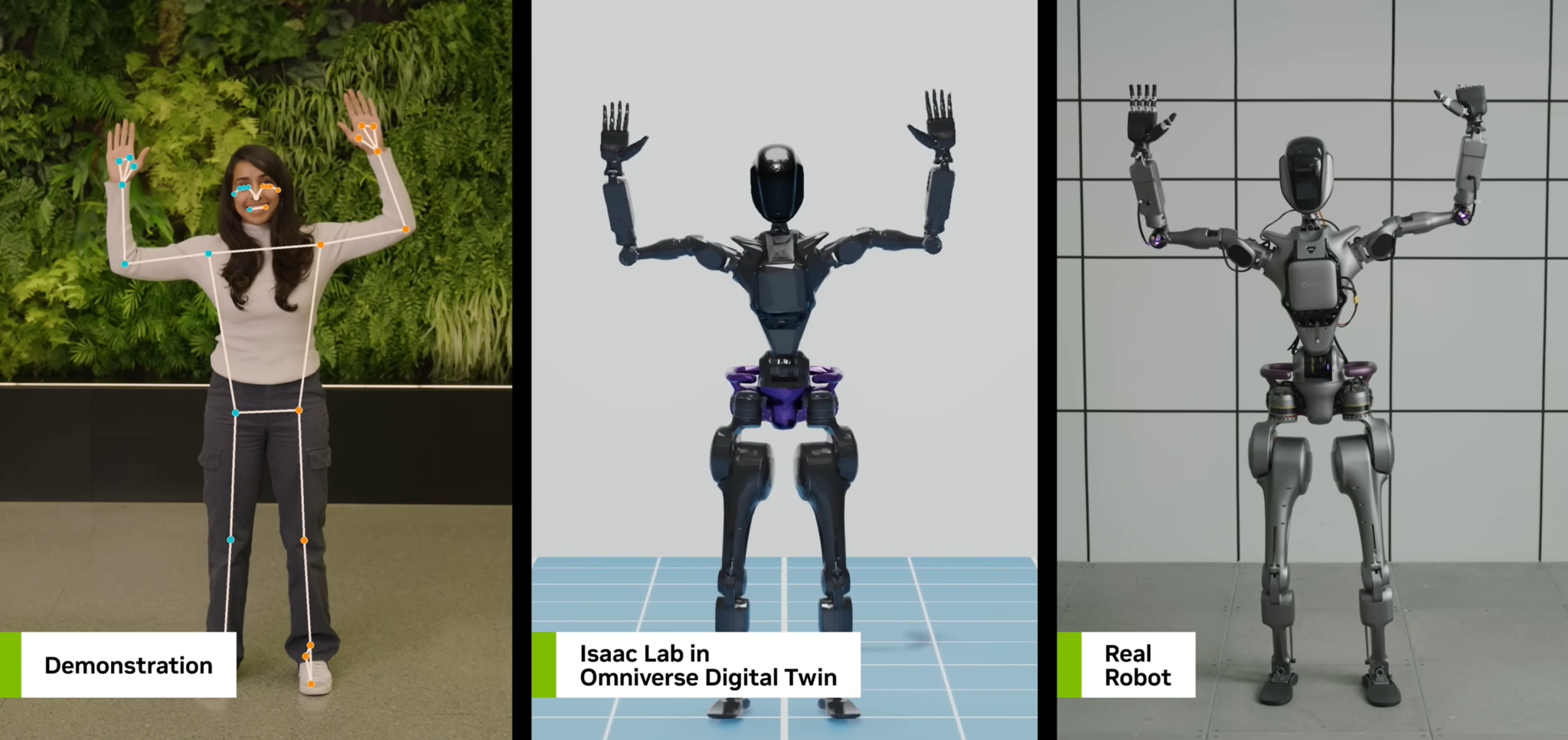
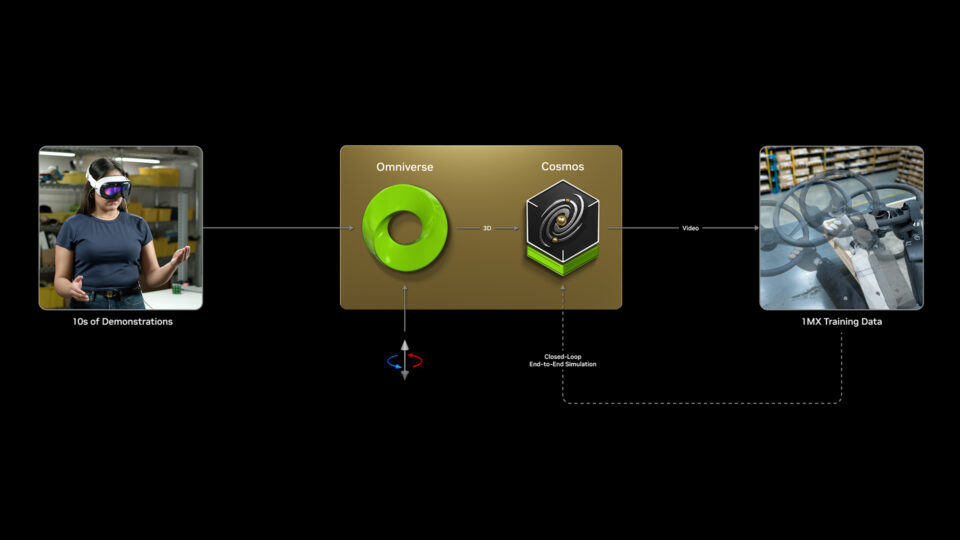
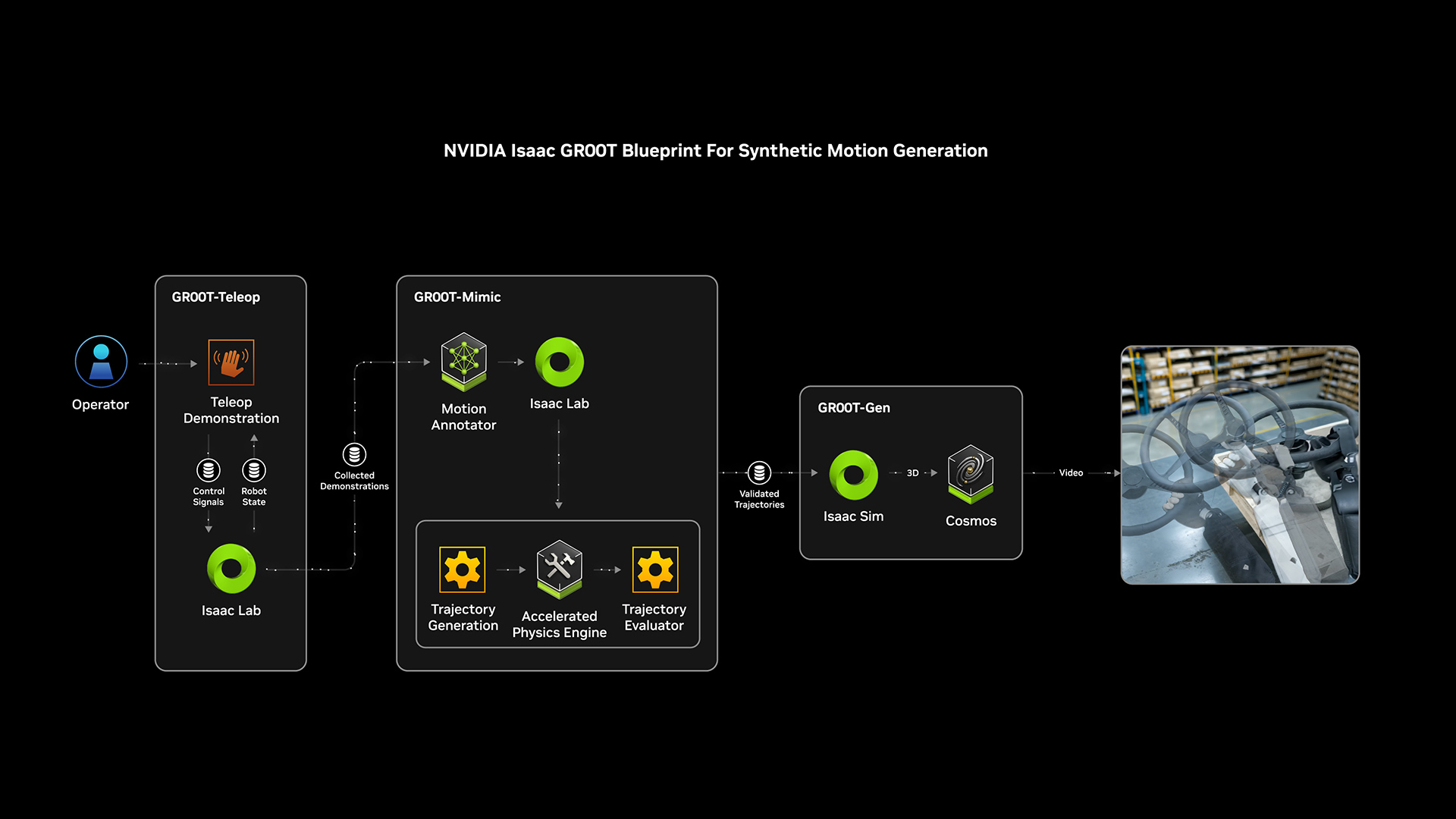
At CES, NVIDIA introduced the Isaac GR00T Blueprint for synthetic motion generation. This blueprint helps developers generate exponentially larger synthetic motion datasets, specifically for training humanoids using imitation learning.
Key highlights of this release include:
- Large-Scale Motion Data Generation: Utilizes simulation and generative AI to produce vast, diverse datasets of humanlike movements, significantly speeding up data collection.
- Faster Data Augmentation: NVIDIA Cosmos world foundation models create photorealistic videos from Omniverse simulations, allowing developers to quickly augment synthetic datasets for training physical AI models and reducing the gap between simulation and reality.
- Simulation-First Training: Shifts reliance from solely real-world testing to virtual environment training, making the process faster and more economical.
- Bridging Virtual to Reality: The combination of real and synthetic data, alongside simulation-based training and testing, ensures that skills learned in the virtual world transfer seamlessly to the real world.
Simulating the Future of Robotics
Humanoid robots are set to enhance efficiency, safety, and adaptability across various sectors, including manufacturing, warehouse and logistics, and healthcare, by automating complex tasks and improving safety conditions for human workers.
Leading robotics companies like Boston Dynamics and Figure have already begun adopting Isaac GR00T and demonstrating promising results.
Platforms like Scaled Foundations’ Open GRID Platform, which integrates with NVIDIA Isaac Sim, are making robotics development more accessible across different robot types, offering a user-friendly, browser-based simulation environment.
Leave a Reply