What are ROS and ROS2?
ROS (Robot Operating System) and ROS2 are open-source software platforms used for controlling and managing robots. Rather than being an operating system, they provide an environment that facilitates communication between robot components, the execution of algorithms, and the processing of data. ROS2 is a more recent and advanced version of ROS, released by Open Robotics in 2015.
ROS2 applications can be used across a wide range of industries, including automotive, healthcare, logistics, agriculture, and more. Each sector can leverage the unique benefits of robotic technology.
You can read our blog on “Robot Operating Systems: ROS and ROS2” for more information on ROS and ROS2 platforms.
NVIDIA Isaac ROS
NVIDIA Isaac ROS is a collection of hardware-accelerated ROS packages designed to create high-performance solutions on NVIDIA hardware. It harnesses the power of NVIDIA platforms, such as Jetson, to develop autonomous robots using hardware-accelerated, high-performance, low-latency ROS 2 packages.
Applications
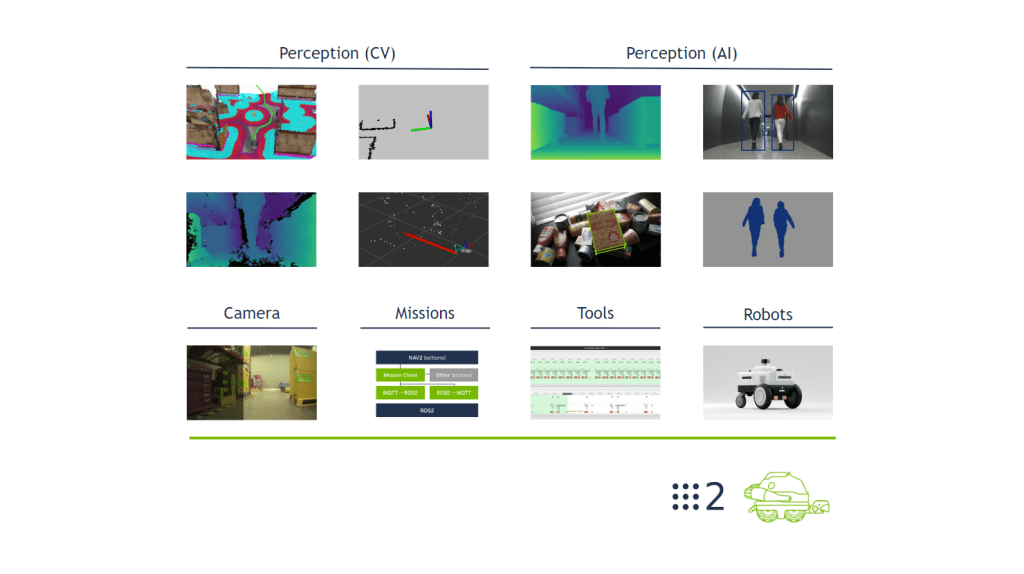
Perception and Sensory Awareness
Isaac ROS provides access to a full range of ROS 2 nodes working on camera and lidar sensor data. This includes DNN-based algorithms that offer high-performance perception and hardware acceleration.
High-Performance Detection
Isaac ROS offers individual packages (GEMs) and complete pipelines (NITROS) with image processing and computer vision functionality. These solutions are highly optimized for NVIDIA GPUs and NVIDIA Jetson platforms.
Contributions
NVIDIA Isaac ROS accelerates the development and deployment of robotic applications. This allows businesses to more quickly leverage robotic technologies and apply them to a wider range of applications. Additionally, Isaac’s simulation capabilities enable more accurate predictions of how robots will perform in real-world conditions.
You can see some of the Isaac ROS packages below. These packages will add significant value to your robotic applications.
nvBlox
nvBlox is a powerful tool designed to accelerate the development and deployment of robotic applications. This library helps robots understand their environment and utilize this information for complex tasks such as path planning. Additionally, nvBlox’s GPU-accelerated algorithms enable robots to map their environment in real-time.
In the video next to this, you can see how nvBlox creates a three-dimensional map while simultaneously removing people from the map.
VSLAM (Visual SLAM)
With VSLAM, your robot uses a stereo camera to perceive its surroundings, gathering valuable data about its location. This data helps the robot understand its environment and determine its position as it moves.
Furthermore, collecting and analyzing this data can improve the robot’s ability to predict future movements, making it more effective and efficient.
Depth Estimation
Your robot uses depth estimation applications to perceive its environment in three dimensions, providing valuable data on its location. This data helps the robot understand its surroundings and determine its position as it moves.
Depth estimation applications assist in determining the distance and location of objects within the robot’s environment.
Computer Vision Applications
Computer vision applications are among the most exciting and rapidly evolving fields of technology. These applications include image and video analysis, object detection, image classification, and more.
Using these applications will significantly ease your robot’s tasks.
We offer a broad range of services for computer vision applications. For more details, you can visit our Computer Vision Applications page.


Have We Left Other ROS2 Packages Behind with Isaac ROS?
No, on the contrary, we are actively integrating ROS2 packages. For example, you can see in the video next to this text that we are running a NAV2 application in Isaac Sim.
By leveraging the best of ROS2 platforms, we offer unlimited solutions. These solutions give you the potential to take your robotic applications to the next level.
Our Services
- ROS2 Application Development: We can develop customized applications using the various features and capabilities of ROS2.
- ROS2 Training and Consulting: We provide training on how to use ROS2 and consulting services to ensure the successful completion of projects.
- ROS2 System Integration: We facilitate the integration of existing systems with ROS2, ensuring that your current hardware and software work seamlessly with ROS2.
- ROS2 Support Services: We offer maintenance and support services for existing ROS2 applications, ensuring that systems remain up-to-date and function effectively.
- ROS2 Research and Development: We conduct research on ROS2 technologies and develop new features, capabilities, or applications.
These services reflect Soluino’s expertise and experience with ROS2. Each service can be tailored to meet the specific needs and goals of our clients, ensuring the successful completion of projects.
For more information please contact us.